System Architecture
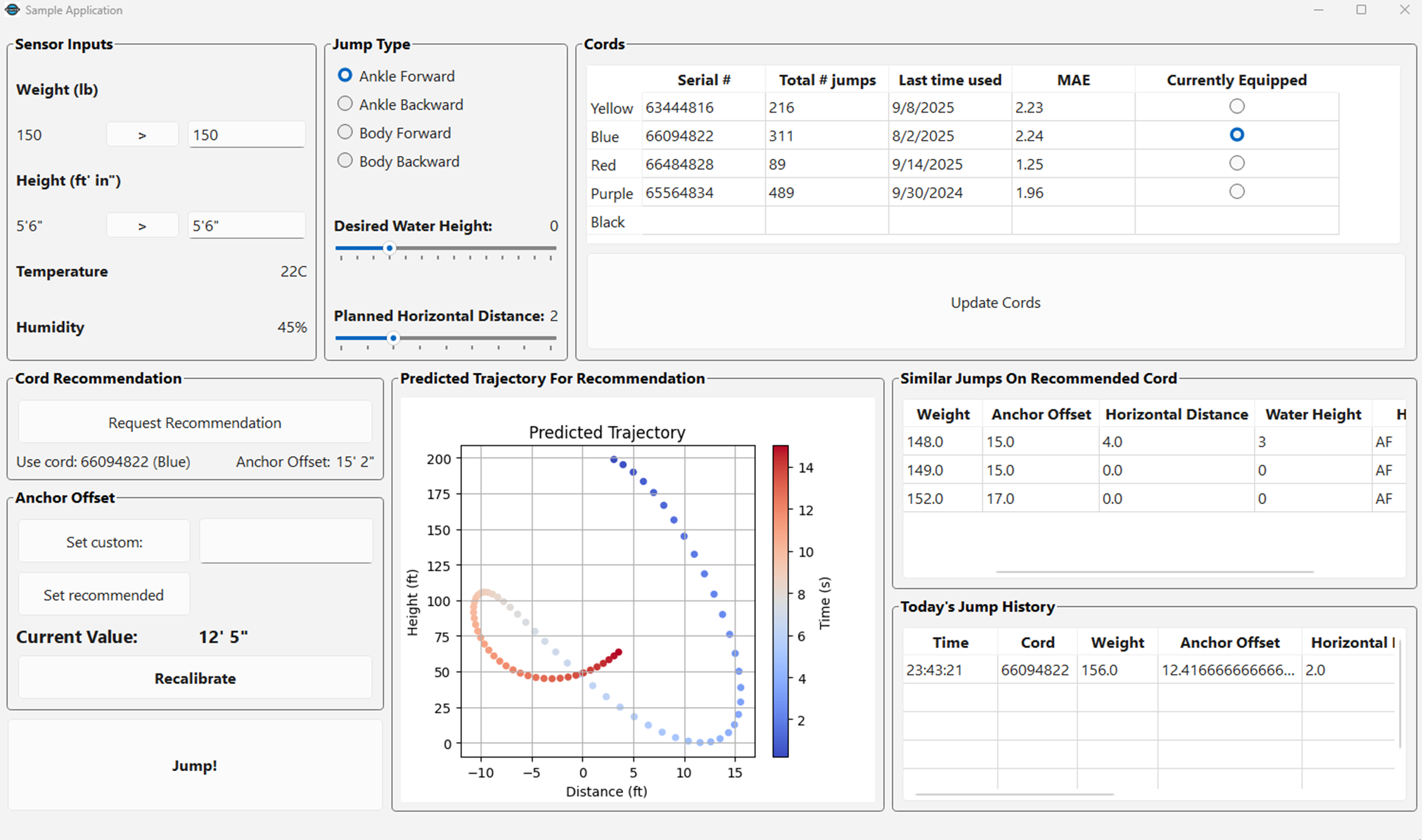
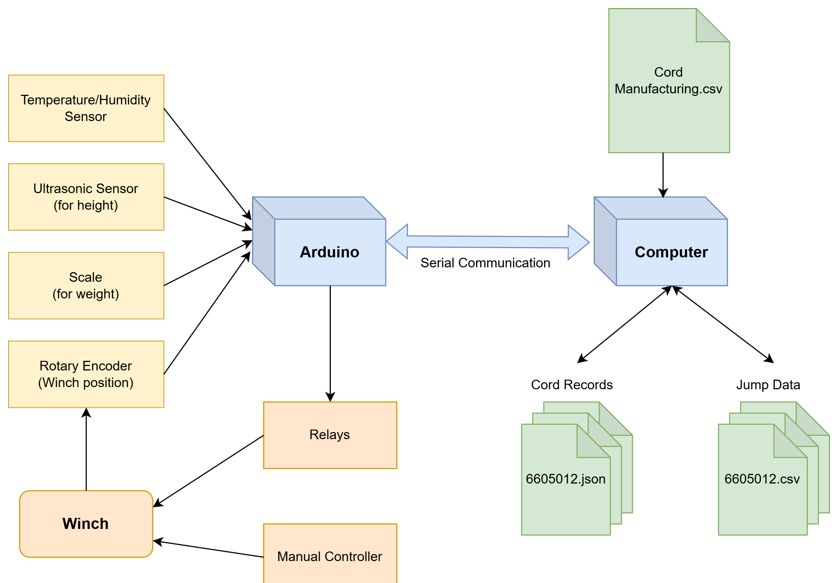
The architecture is built around a clear split of responsibilities. The desktop application handles
simulation, recommendation, and operator-facing workflow, while the Arduino is used for real-time I/O,
sensor sampling, and relay control.
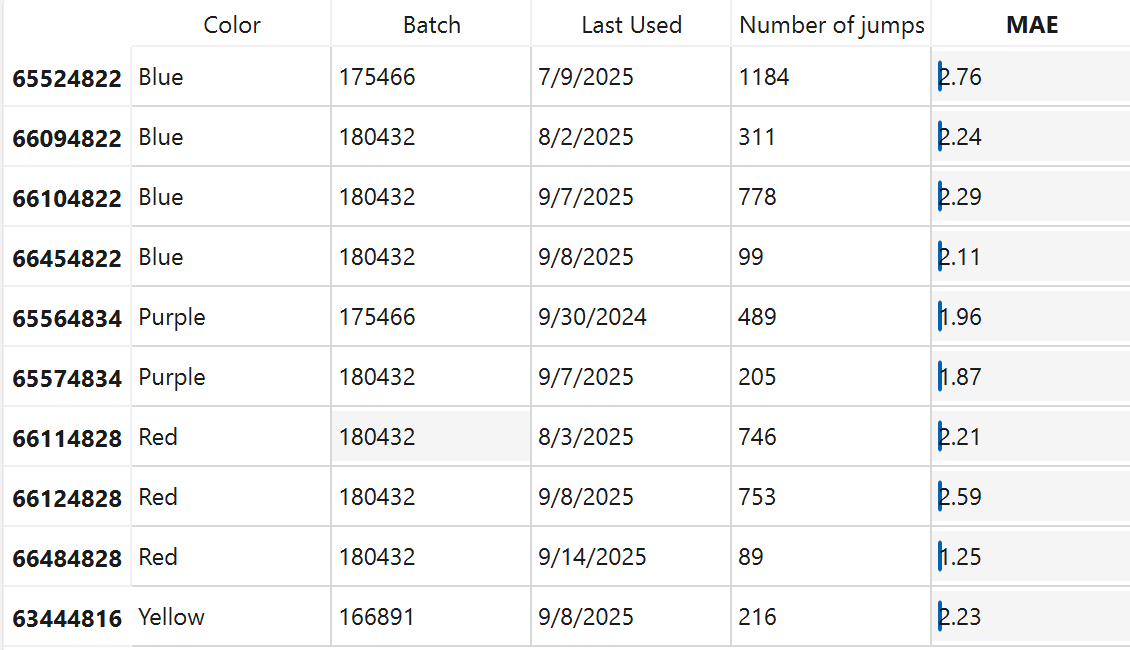
The system uses two connected file layers. Each cord has a JSON record that stores stable
metadata and fitted model parameters, while each cord also has a CSV jump-history file that stores every
completed jump event with measured outcomes.
During recommendation, the software first loads the relevant cord JSON records to get the current model
parameters and service state, then references recent entries in the associated CSV history for context and
operator sanity-checking. After a jump is completed, new measured results are appended to the CSV, and
periodic refitting updates the corresponding JSON parameters so future recommendations reflect cord aging
and real usage data.